- 方案分类
- 反无人机的设计

反无人机的设计
无人机导航管制基本机理是伪造虚假卫星导航信号,通过空间辐射方式到达被管制无人机目标,使得目标无人机的卫星导航接收机无法正常接收空间真实卫星导航信号,转而信任导航管制源播发的欺骗信号。
1. 无人机导航管制机理
无人机导航管制基本机理是伪造虚假卫星导航信号,通过空间辐射方式到达被管制无人机目标,使得目标无人机的卫星导航接收机无法正常接收空间真实卫星导航信号,转而信任导航管制源播发的欺骗信号。
要实现准确快速有效的无人机导航管制,虚假导航信号模拟尽量与空间真实信号一致,逼真模拟需要从导航管制源精确授时、调制信号相位一致性、信号带内平坦度、功率控制等几方面开展设计。
无人机管制本质是导航对抗,是反无的重要组成部分,以压制和欺骗等方式,执行对无人机所用的GPS、GLONASS、Galileo、BDS等导航系统的导航对抗任务。
2. 设备授时精度设计
无人机导航管制源实现空间导航信号逼真模拟,就必须满足与空间真实导航信号时空统一。即与真实卫星导航系统使用相同的时间信息和卫星星历信息。无人机导航管制源获得到的授时时间越精确,其模拟的虚假信号在时间上与空间真实信号一致性就越好,换句话说,在严格时间同步基础上消除空间传播误差后,虚假信号在抵达目标无人机接收天线处与空间真实导航信号完全同步,这样就能以极其微弱的电平优势顺利切入目标,获得目标的掌控权。
无人机导航管制源配备时间同步接收和授时机制,系统同步误差需从伪码测量误差、标定误差、时延稳定性误差等几个方面展开分析。
ü 伪码测量误差
伪距测量采用码环跟踪的方式来实现的,码环的跟踪误差决定了整个伪距测量的精度。码环跟踪的误差主要由码环估计器的性能而决定的。若码环估计器采用最大似然估计准则,那么克拉美罗界可以用来衡量估计器的误差性能。
由克拉美罗界的理论计算,可以推导出估计器输出的估计误差的最小方差为:
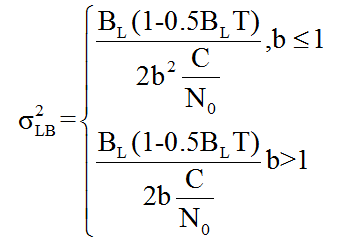
式中参数b为射频前端带宽与伪码码宽的乘积。相干延迟锁定环是本项目研制的高精度共视接收机中采用的码跟踪环路,分析器估计误差直接决定了接收机机的伪距测量精度,相干延迟锁定环的估计误差为:
根据接收机的输入信号条件,在接收信号灵敏度电平下,对于GPS伪码测量误差约为0.8ns;对于BDS伪码测量误差约为0.5ns。
伪码测量误差记作△1,这里取最大值0.8ns。
ü 设备时延标定误差
初始设备时延标定可采用同源零基线的标定方法,也可采用无线全链路设备时延标定方法,采用无线全链路设备时延标定方法标定误差不超过2ns。
设备时延标定误差记作△2,取2ns。
ü 设备时延稳定性误差
通常,温度是影响设备时延稳定性最主要因素,通过合理的设计保证温度变化范围不超过5℃,考虑到室外电缆、天线等设备为全温度范围,设备时延稳定性优于1ns。
设备时延稳定性误差记作△3,取1ns。
ü 电离层误差
电离层误差通常为Klobuchar模型法,该模型将早8点之前,晚20点之后这段电离层中自由电子和离子活动不强烈的时间段的时延值估算为5ns,将早8点至晚20点之间的时间段的电离层时延值由一个以当地时间t以及卫星星历参数
ɑ0,ɑ1,ɑ2,ɑ3和β0,β1,β2,β3为参数的余弦函数表示。Klobuchar模型可修正电离层影响的60%,理想情况下可达75%。
在实际使用中为获得更高的精度可以采取双频电离层修正法,采用双频电离层修正的方式消除电离层误差中的一阶项,残余高阶项不能修正,通常认为双频改正能够修正90%以上的电离层误差;考虑不同设备间的基线长度,电离层误差具有相关性,因此预计电离层残留误差应在0.5ns以内。
电离层误差记作△4,取0.5ns。
ü 对流层误差
由于对流层的特殊组成,分析对流层时延时将这部分大气分为干分量和湿分量,再分别与相应的投影函数相乘,既可得对流层的总时延。
选取地面站在海拔0km处和5km处,0km处气象参数选取为标准值,5km处的气象参数可根据标准值求得。由仿真分析可知Hopfield模型与Saastamoinen模型的趋势相同,都是随着高度角的增大而降低,高度角小于20°时下降明显,在高度角大于35°以后趋于平稳,在改变地面站海拔高度后Saastamoinen模型较好的反应了大气环境的变化,并且由于该模型是将对流层分为两层进行计算的,所以该模型适宜在精度要求较高的条件下使用。
对于共视比对来说,对流层误差主要由于两地气象条件差异造成,对流层采用模型法修正并结合当地气象数据,造成的比对残留约为0.5ns。
对流程误差记作△5,取0.5ns。
ü 星历误差
卫星位置误差主要由广播星历的误差引起,通常广播星历的精度较低,预计引入的误差约为5ns。
星历误差记作△6,取5ns。
ü 多径误差
多径误差主要由于接收机所处的地理环境造成,由于时统设备应用于海洋环境,海面反射信号干扰较大,通过制定合理的选星策略,避免使用低仰角卫星,并采用合理屏蔽措施降低多径影响,多径误差取2ns。
多径误差记作△7,取2ns。
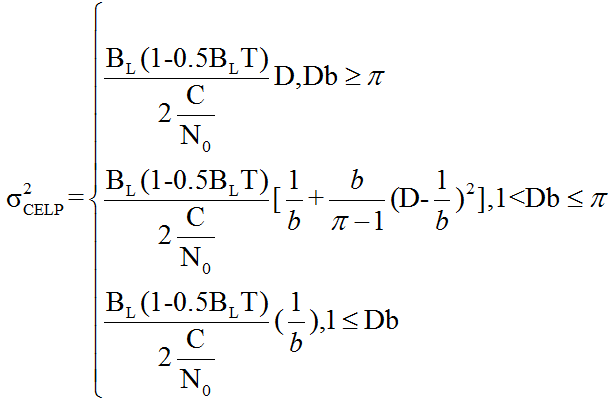
综合以上多项误差值,系统时间同步精度为:
可见误差在10ns量级,考虑到驯服时钟算法等因素,这个值一般会在20ns左右。攻击目标以GPS L1为例,L1民用信号为L1C/A,一个码片长度为1us左右,一般当欺骗信号在真实目标1.5码片内时,接收机是无法分辨的。此时欺骗信号即可切入,实现导航欺骗干扰。
3. 调制信号相位一致性设计
无人机导航管制领域,包括了导航多个频段,其中最具代表性的是GPS L1、L2,其代表了卫星导航信号的两个频段,可以扩展到BDS、GLONASS等其他系统。对于卫星导航调制信号,信号在空间传播,需要对共同作用同一个目标,相位差是一个比较重要的指标,该信号通过信道传输直接作用于被测接收目标,这关系到测试目标接收通道一致性乃至定位结果。由信号电路设计可知,对输出相位差要求,主要是比较L1和L2合路后的两路之间的相位差,其中影响最大的是合路器的相位一致性。通道前面是数字信号,不会对相差产生影响。
合路器是工艺成熟设备,其技术参数可控,合路器相位指标参数可知L1和L2频段合路相位差≤1°。
同时还要保证两路的衰减在相同状态下进行比较,其中滤波器要求相位一致性≤±3°,其余器件采用相同批次,电路设计采用完全一致的通道电路,最终可以实现相位差≤±5°的要求。
通过电路设计和器件选型,可以满足反制无人机技术需求。
4. 导航信号带内增益平坦度设计
导航信号包括比较宽的两个频段,多个频点播发时,需要考虑带内平坦度。这个指标关系到无人机导航管制源的功率能效。
当处于工作状态时,导航信号产生模块,通道上器件的增益(或插损)特性需要以此分析。
1)合路器
合路器插入损耗值与通过信号频率有关,一般来说,频率越高,插损越大。选择合适的合路器件,根据合路器频率相应特性,在通带:950MHz~2150MHz频段内,带内平坦度任意200MHz:≤0.1dB,全频带范围≤0.3 dB。
2)带通滤波器
导航测试信号通过合路器之后或之前,使用带通滤波器进行滤波,保证有用信号通过,滤除信号调制过程中产生的谐杂波。我们在设计时采用定制滤波器方式。该滤波器为定制器件,为了尽量满足平坦度的要求,该滤波器的特性如下:
在通带1100MHz~2150MHz频段内,任意50MHz,带内平坦度:≤0.3dB。全频段范围内不大于1.5dB,可以满足要求。
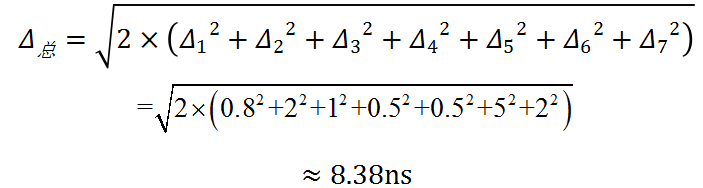
3)数控衰减器
数控衰减器是反无设备不可缺少的重要器件,用于实现管制信号电平的精确调整,也是影响增益平坦度的因素,其插入损耗曲线如下图所示,可以看出,在导航频段对平坦度影响很小。
图1 数控衰减器损耗特性参数
4)放大器
放大器是放大链路的末端,增益特性曲线如下图所示:
图2 放大器增益特性参数
综上,除滤波器外的其它器件的增益(插损)波动,都是随着频率升高而降低(增大)的,全频带合计≤1.5dB。再加滤波器和电路匹配设计,并且在链路末级设计有均衡器,能够均衡整个带宽的平坦度,使全频段范围内带内增益平坦度达到1dB以内。
而且从以上曲线看,增益或插损全部是单调变化,最终可以实现任意40MHz范围±0.2dB的平坦度。
5. 信号产生功率控制精度设计
在信号产生过程中,需要对信号输出功率进行精确控制,目前市场上常用信号源的输出功率控制精度可达0.1dB,该指标的实现一般通过基带信号功率调整实现,调整精度和基带运算数据位宽、DAC位宽有关,当设计位宽为12时,基带功率控制分辨率为
在实际调整过程中,按照0.1dB步进进行,进一步配合外置衰减器,可实现60dB以上功率控制范围。
6. 小结
卫星导航欺骗实质上是对接收端授时系统的欺骗,通过分析卫星导航接收机定位、授时过程,可推导出卫星导航抗欺骗原理。
GNSS接收机在捕获过程是一个三维搜索过程,搜索维度为卫星号、载波频率、码相位。通过非相干积分检测量是否超过预设捕获门限来判定捕获是否成功。搜索检测是否有两个相关峰超出了既定门限,从而判断当前环境中是否存在欺骗式干扰信号。若码相位/载波频率二维搜索域内存在两个相关峰,即可判定欺骗信号存在。
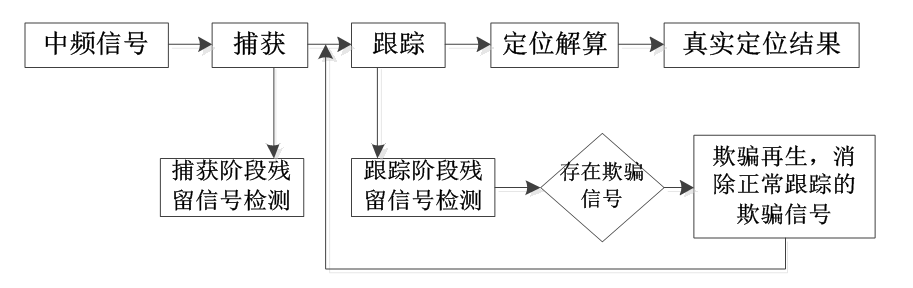
图3 抗欺骗技术原理框图
当导航管制信号源精确的获取了空间星历信息和时间信息,通过误差消除算法,将虚假信号传播延迟抵消,使得反制信号在抵达目标无人机时与空间真实信号偏差在1.5码片内,控制信号播发功率,在微弱电平优势条件下,可以实现目标无人机有效管控。
word资料附上,可下载: